

Actionneur: les différentes techniques
Pour commander les organes et membres d'un robot, une série de technologies sont actuellement utilisables.
Comment animer un robot?
Les propriétés piézo-électriques sont exploitées par l'actionneur électrostatique. Une barre céramique s'allonge en proportion de la tension du courant qui est appliquée aux pôles, à ses deux extrémités. On utilise cette technique pour actionner les têtes d'impression des imprimantes à jet d'encre. Elle semble plutôt dévolue à de petits objets et pourrait mouvoir des micro-robots.
On peut fabriquer un actuateur sur ce principe. La céramique est formée de polymères métal-ion qui ont la propriété de se déformer à de très faibles tensions (moins de 2 volts) et d'être aussi de bon conducteurs.
Avec la magnétostriction, un champ magnétique déforme les matériaux ferromagnétiques, autrement dit; fait d'un alliage comportant des aimants. La très faible déformation du matériau réserve ce procédé à des appareils sensibles, mais puisqu'il faut aussi un transducteur de taille imposante, cela ne convient pas à des micro-robots. Le matériau convenant le mieux est l'alliage fer-cobalt avec ou non addition de nickel. L'allongement est jusqu'à 5 fois supérieur à celui obtenu avec le piézoélectrique. La force obtenu par une telle déformation est énorme mais l'allongement reste à peine visible à l'oeil nu.
Le principe de la pompe à air est plus moderne, en robotique tout au moins. En insufflant de l'air dans un récipient, on le gonfle. Et en aspirant cet air, on le rétracte. Cette propriété a été utilisée pour créer une main préhensible, sans autre forme d'action. Cela suppose un réseau de canaux pour transférer l'air là où il est nécessaire afin de former un mouvement du membre. Toutefois cette technique ne semble pas idéale pour un développement à grande échelle.
Maintenant nous allons voir deux technologies plus appropriées à la robotique et plus abordables.
La mémoire de forme
On utilise la mémoire de forme en nanotechnologie ou pour actionner de petits mécanismes. Un alliage (AMF) soumis à une élévation de température change de forme et retrouve sa forme initiale à température ambiante. Son efficacité dépend en fait de la vitesse à laquelle on peut produire une élévation de température ainsi que du refroidissement. Ce principe est mis en application dans le Flexinol.
Le Flexinol est un fil musculaire qui se rétracte à la chaleur a l'avantage de produire une force importante et l'inconvénient de la lenteur. La distance de compression est autour de 5%, ce qui ne suffit pas à imiter l'action d'un muscle, aussi on l'utilise en combinaison avec un mécanisme (selon le même principe qu'une poulie ou une boite de vitesse) pour démultiplier la distance lors de l'action. Ce matériau ne reprend pas sa taille originelle après l'action, il faut donc l'associer à un ressort ou un contre-flexinol pour revenir en position. On ne peut pas vraiment l'utiliser en robotique du fait de sa lenteur sauf pour certaines parts du robot et il est peu onéreux (moins de 10 $ pour 1 m de fil supportant 2 kg). Le fabricant est Dynalloy.
L'actuateur Firgelli
La technologie utilisée n'a rien à voir avec ce que l'on a vu précédemment. Il s'agit d'un banal moteur électrique couplé à une vis pour convertir la rotation en élongation ou rétrécissement! Il revient en position initiale quand le courant est coupé ou quand on inverse les polarités. Selon le fabricant, il est possible de contrôler l'actuateur à partir du logiciel Labview dès lors qu'il se trouve connecté à une prise USB grâce à une carte de contrôle.

Le modèle L12 ci-dessus qui coûte une centaine d'euros a un usage robotique. Il mesure entre 5 et 10 cm, pèse 28 g pour le modèle le plus léger et accomplit une distance de deux cm par seconde ce qui est très rapide. Il requiert une tension de 6 v que l'on peut réduire, ce qui alors réduit sa vitesse.
Construire un actuateur
Après avoir acquis une imprimante 3D, il devient possible de fabriquer ses propres actuateurs. Cela permet de choisir la forme et la taille désirée pour les éléments mécaniques, et la force en choisissant le moteur et la tension.
La construction d'un actuateur peut s'inspirer du schéma simplifié suivant:
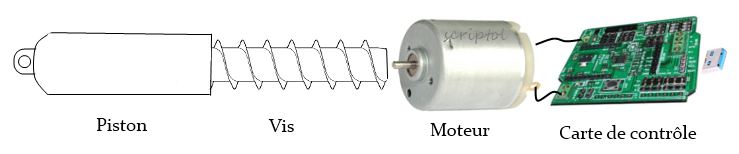
Le courant est amené par l'intermédiaire d'une carte de contrôle, ce qui permet d'inverser les polarités pour rétracter le piston, lequel est rattaché aux membres du robot. On peut séparer l'actuateur du membre en utilisant un fil glissant dans une gaine (comme les freins sur un vélo), auquel cas il faut ajouter un fil antagoniste pour obtenir les mouvements opposés de contraction-extension.
Il existe des cartes Arduino à assembler ou acheter pour contrôler un moteur électrique, ainsi qu'une librairie dédiée, AF Motor. Une fois incluse, on peut utiliser un code comme celui-ci:
#include <AFMotor.h>
AF_Stepper motor(20, 2); motor.setSpeed(300); ...
Liens externes
Arduino. Plateforme open source pour construire ses propres cartes de contrôle.